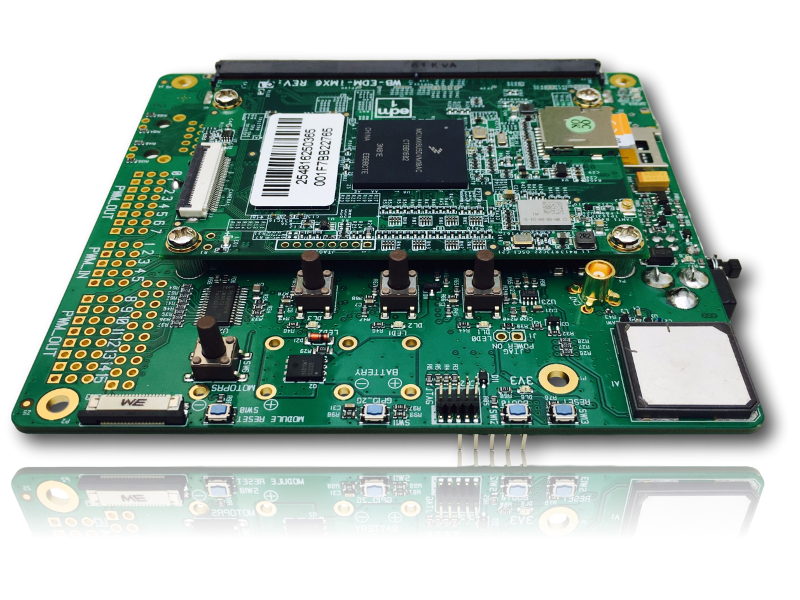
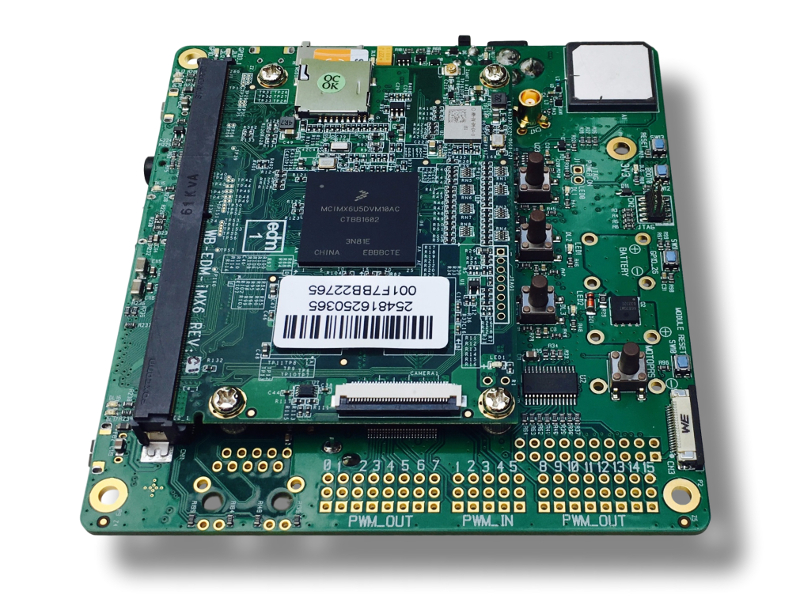
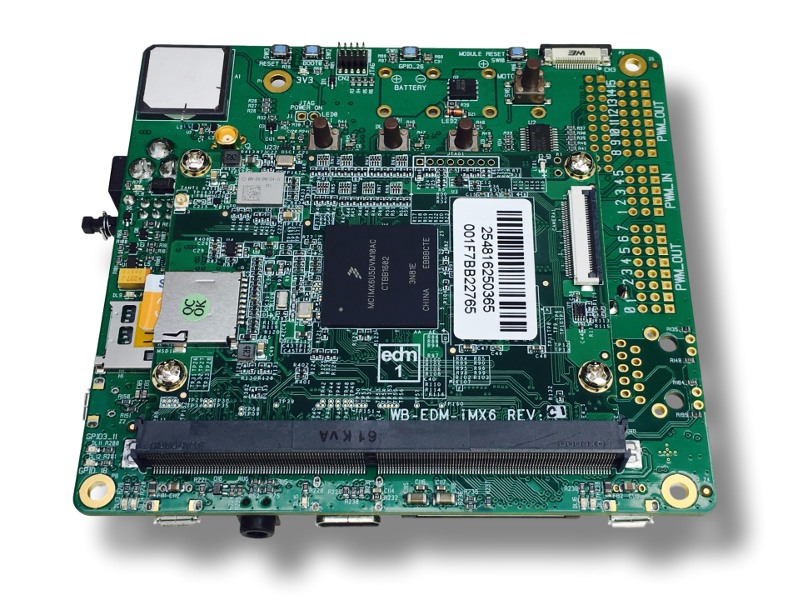
ColibriBoard is the next generation, powerful and highly integrated flight controller for multi-rotor UAV. ColibriBoard offers impressive list of features, unmatched by any of the flight controllers that are currently on the market.
Colibri acts as a baseboard for the WandBoard system-on-a-module (www.wandboard.org), hence there are 2 CPUs at developer’s disposal:

![]()
The outside world connects to Colibri using SigmaDrone’s JSON RPC API, accessible over the WiFi hotspot exposed by Wandboard. The Cortex A9 relays the commands to the Cortex M4 via high-speed serial bus, thus giving the user powerful toolset to control the drone both in flight and at rest.
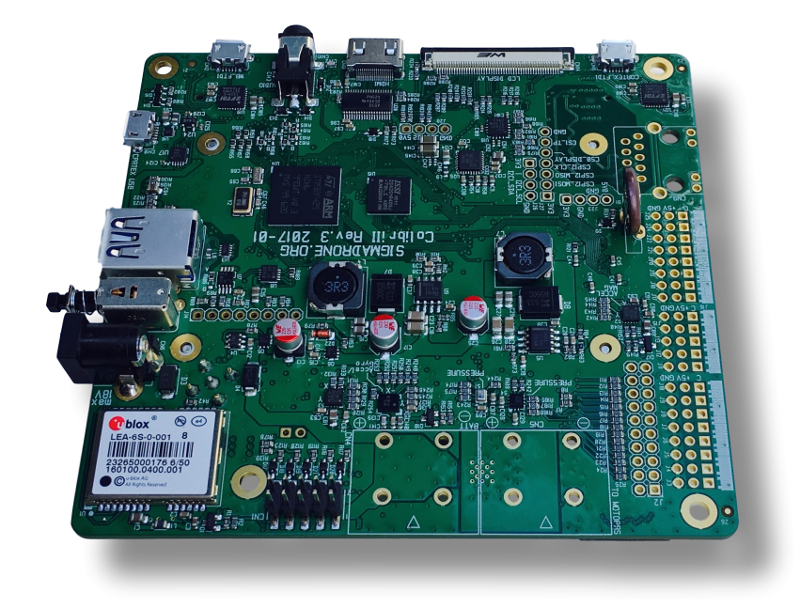
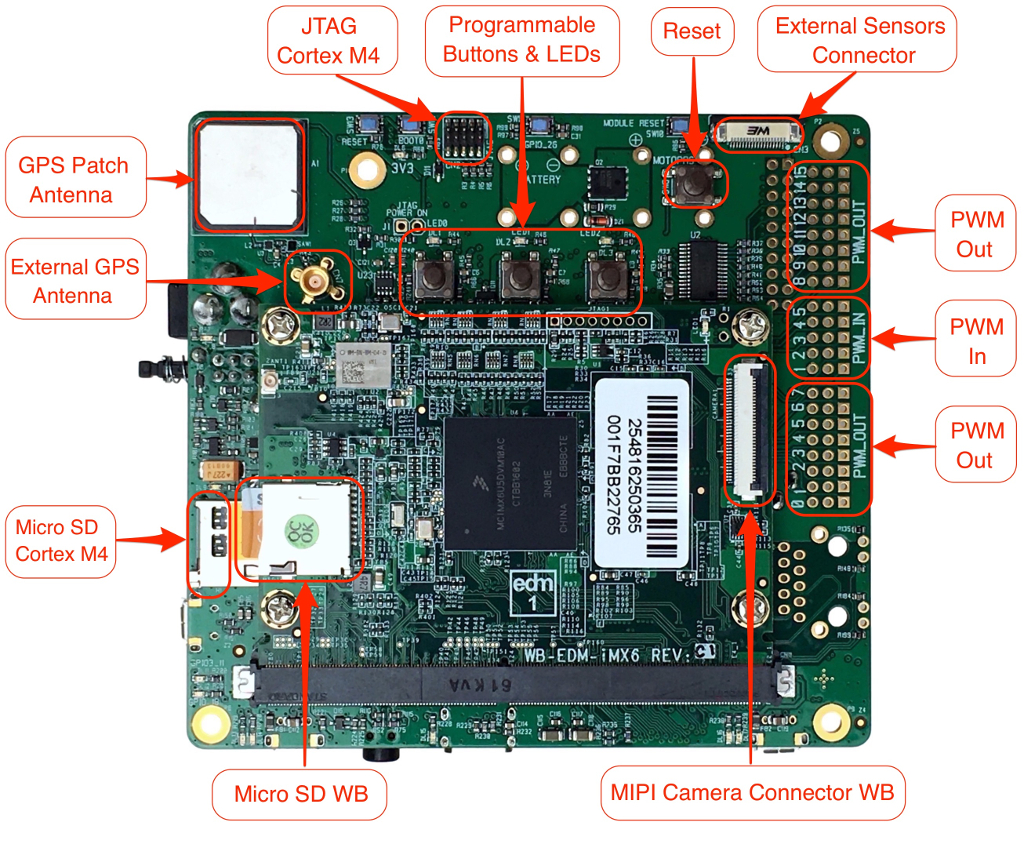
Just like any modern flight controller, Colibri has state of the art 9 DOF inertial measurement unit, with back-up gyroscope and accelerometer, and 2 pressure sensors. Additional sensors may be attached through the externally available SPI and I2C buses.
On board Colibri there is an uBlox LEA-6S GPS module with a patch antenna, but there is also an option for attaching an external antenna. The GPS module has a backup battery for fast re-sync after a power-cycle.
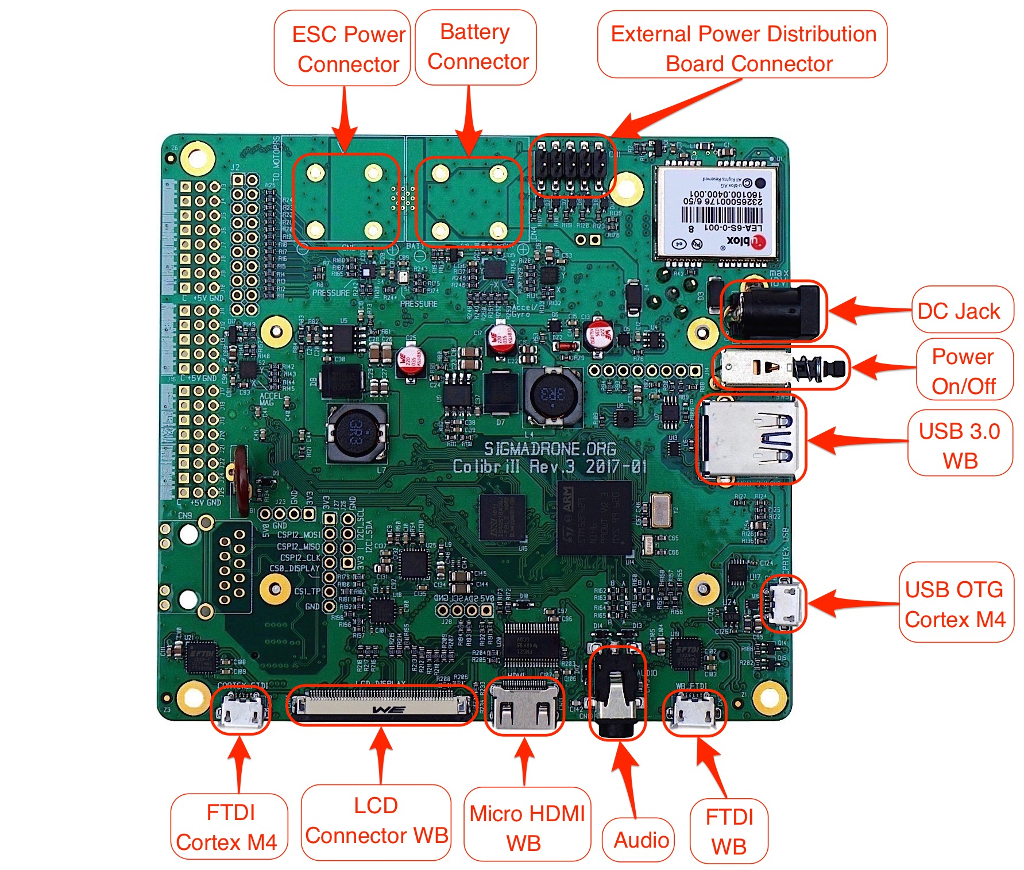
Colibri offers a rich list of options for attaching additional devices:
Colibri is an open source and open hardware project - no secrets, only solid engineering!
| Parameter | Colibri | Wandboard |
|---|---|---|
| CPU | STM32F429 Cortex M4 @190MHz | Dual or QuadCore Cortex A9 @1GHz www.wandboard.org |
| Memory | 2MB flash, 192 kB RAM, 8 MB external RAM | 1GB RAM |
| Power/Battery | 3S-4S LiPo, 9-18 V through power jack | Powered by Colibri |
| WiFi | 802.11n, antenna is included | |
| Micro SD | 1 | 1 |
| USB | 1xUSB OTG | 1xUSB 3.0 |
| Serial Port/FTDI | 1 | 1 |
| Micro HDMI | 1 | |
| MIPI Camera Interface | 1 | |
| LCD Connector | 1 | |
| JTAG | 1 | |
| Accelerometer, Magnetometer | STM LSM303 | |
| Gyro | STM L3GD20 | |
| Backup Gyro/Accelerometer | STM LSM330 | |
| Pressure Sensors | Bosch BMP280STM LPS25H | |
| Connector for External Sensors | 6xGPIO, 1xI2C, 1xSPI | |
| GPS | uBlox LEA-6S | |
| GPS Antenna | Patch antenna; connector for external antenna | |
| PWM Output | 8 channels, controlled by Cortex M4;8 channels controlled by PCA9685 | |
| PWM Input | 5 channels sampled by Cortex M4 | |
| Programmable Buttons | 3 | |
| Programmable LEDs | 3 | |
| Weight | 80g | 20g |
| Dimensions | 111mm x 103mm | |
| Operating System | FreeRTOS | SigmaDrone Linux Distro, built with Yocto |
| Parameter | ||
|---|---|---|
| CPU | STM32F429 Cortex M4 @190MHz | |
| CPU (Wandboard) | Dual or Quad-Core Cortex A9 @1GHz | |
| Memory | 2MB flash, 192 kB RAM, 8 MB external RAM | |
| Memory (Wandboard) | 1GB DDR3 RAM | |
| Power/Battery | 3S-4S LiPo; 9-18 V through power jack | |
| WiFi | 802.11n | |
| Micro SD | 1 (Cortex M4); 1 (Wandboard) | |
| USB OTG | 1 | |
| Serial Port/FTDI | 1 | 1 |
| Host USB 3.0 | 1 | |
| Micro HDMI | 1 | |
| MIPI Camera Interface | 1 | |
| LCD Connector | 1 | |
| JTAG | 1 | |
| Accelerometer, Magnetometer | STM LSM303 | |
| Gyro | STM L3GD20 | |
| Gyro2, Accelerometer2 | STM LSM330 | |
| Pressure Sensors | Bosch BMP280STM LPS25H | |
| External Sensors Connector | 6xGPIO, 1xI2C, 1xSPI | |
| GPS | uBlox LEA-6S | |
| GPS Antenna | On board patch antenna; connector for external antenna | |
| PWM Output | 8 high precision channels, controlled by the Cortex M4 timers 8 channels controlled by PCA9685 | |
| PWM Input | 5 channels | |
| Programmable Buttons | 3 | |
| Programmable LEDs | 3 | |
| Weight, g | 80 | 20 |
| Dimensions, mm | 111 x 103 | |
| Operating System | FreeRTOS | SigmaDrone Linux Distro, built with Yocto |
© 2017 Sigmadrone