
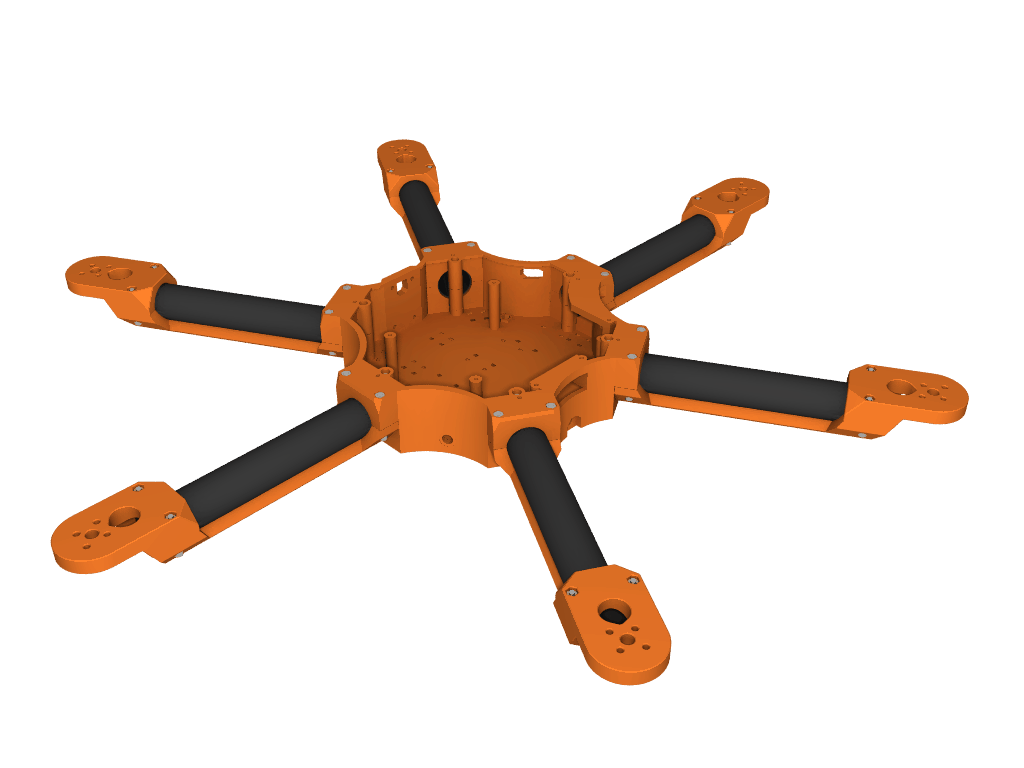
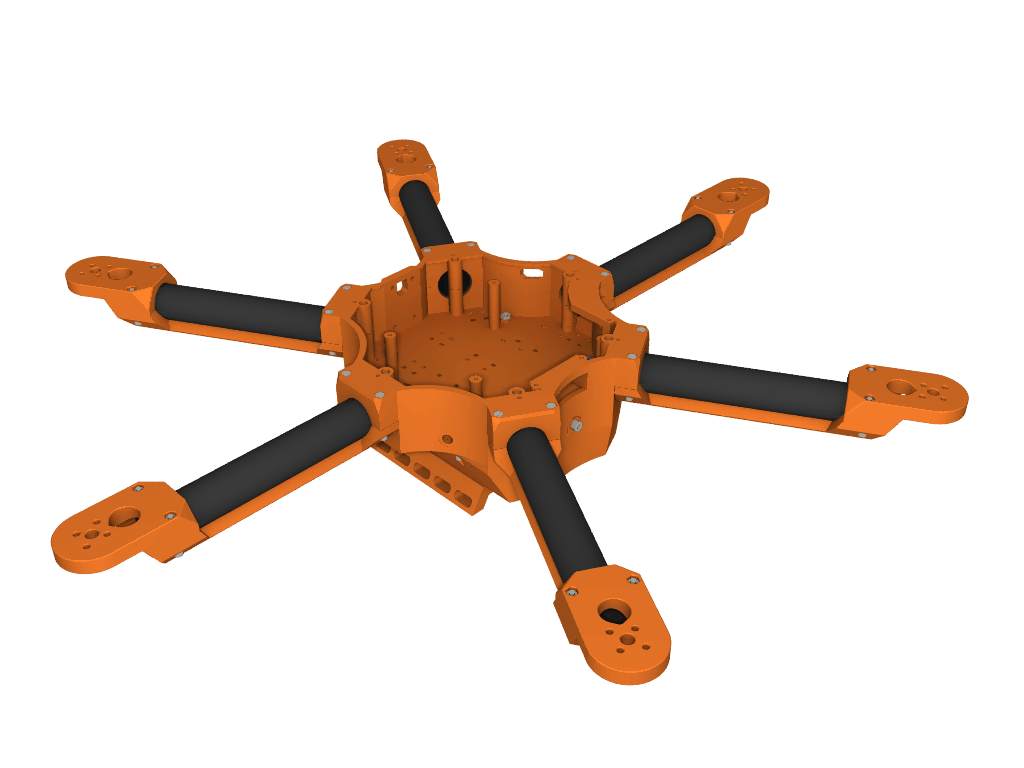
The STO56 is 3D printed frame. The wings use carbon fiber tubes with 25mm outer diameter to add rigidness and endurance to the frame.
Features:
Hardware:
Software:
This frame is compatible with DJI 2212 BLDC type motors.
The latest CAD development files can be found in our GIT repository: sigmadrone-cad.git . The Production STL files can be downloaded bellow.
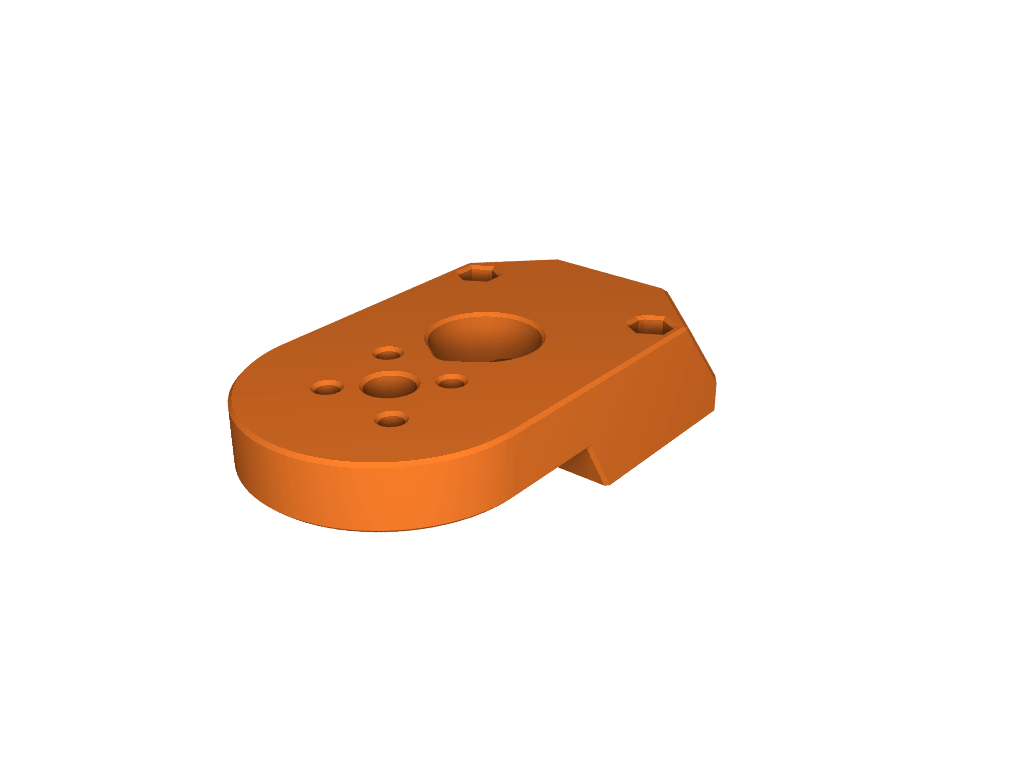
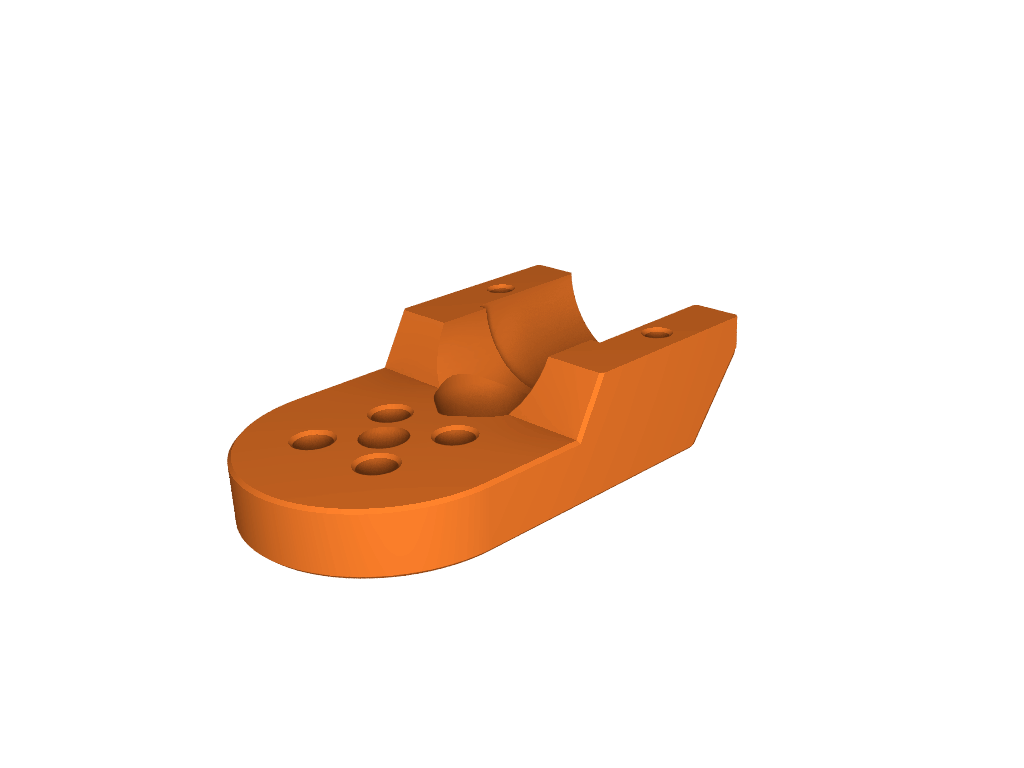
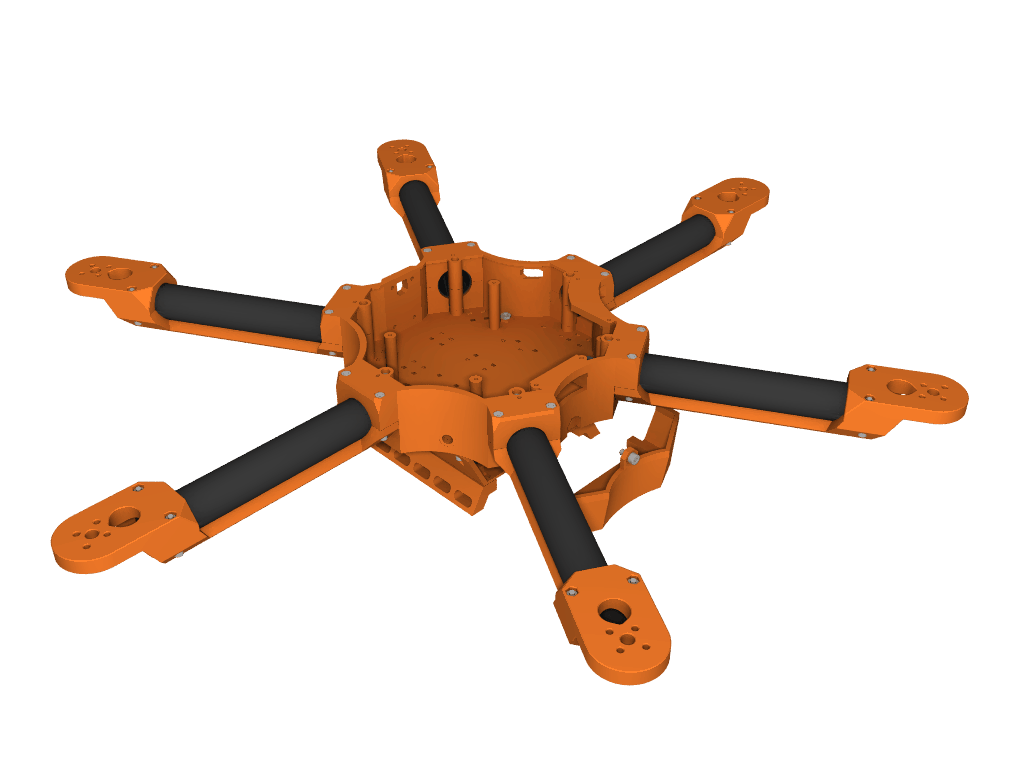
Mount the motor to the clamp with four M3x8mm Hex Cap Screws.
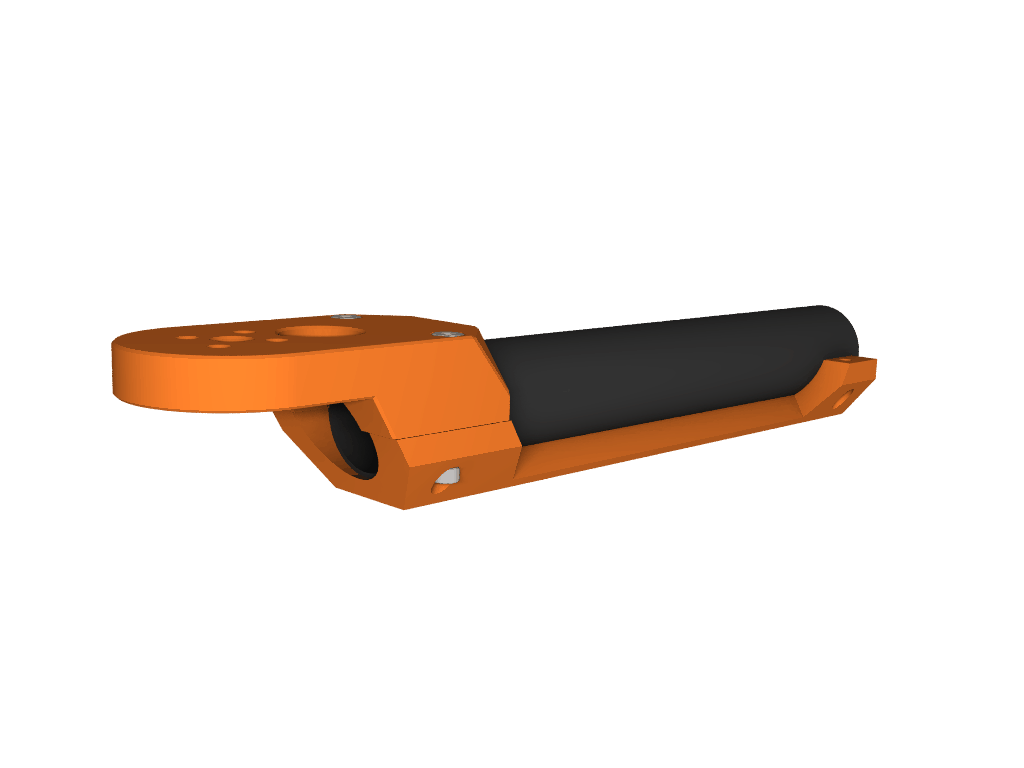
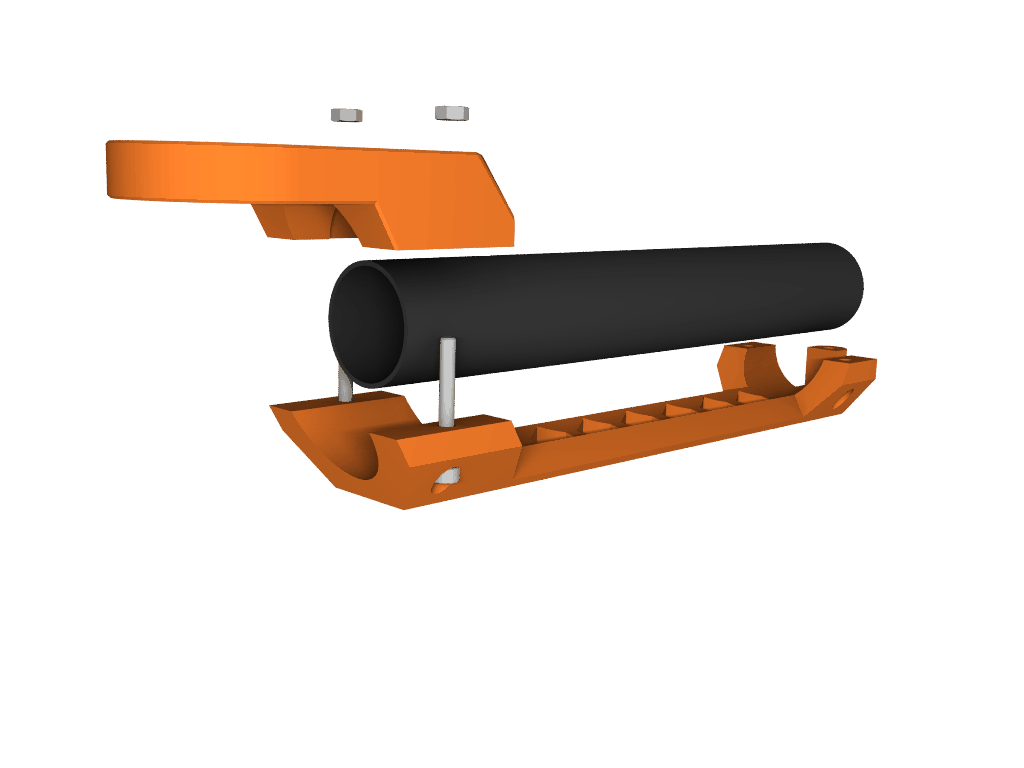
Insert 165mm long carbon fiber tube with outer diamerter of 25mm between the wing and the motor clamp. Fasten the assembly with two M3x25mm hex cap screws and two M3 self locking nuts.

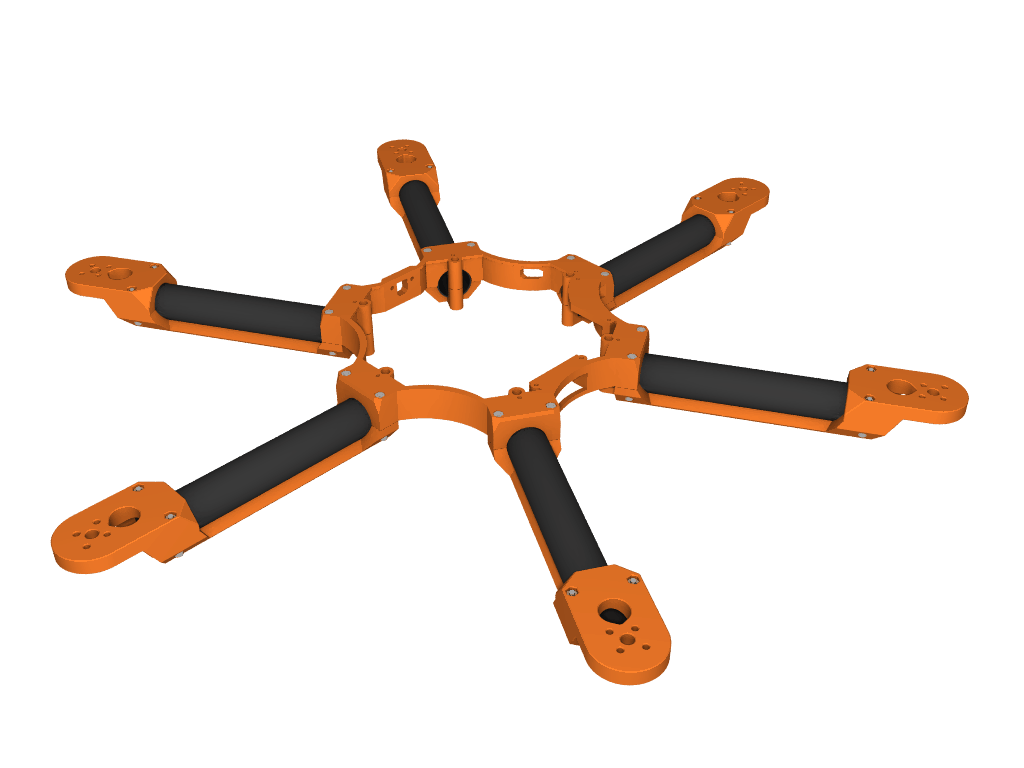
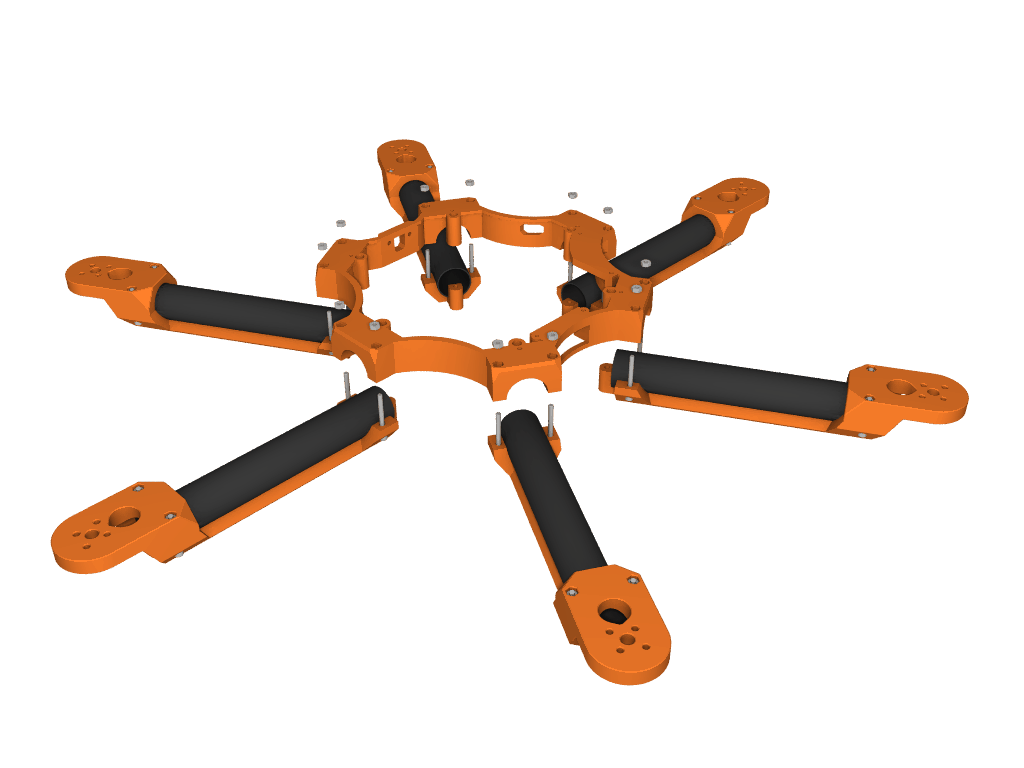
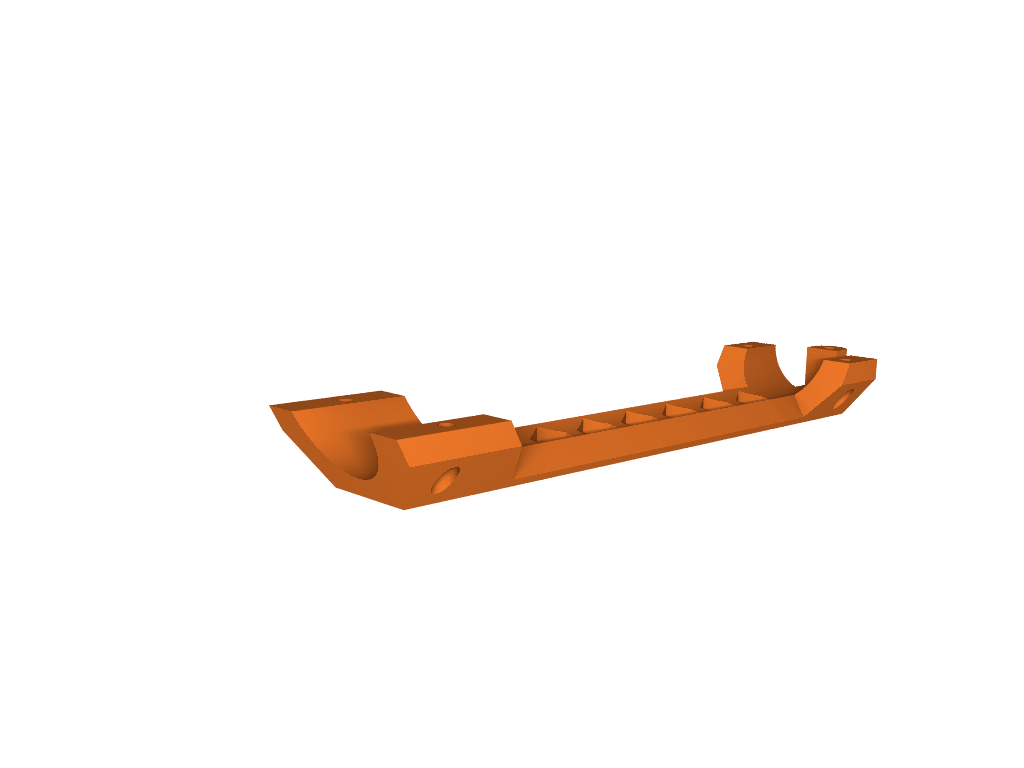
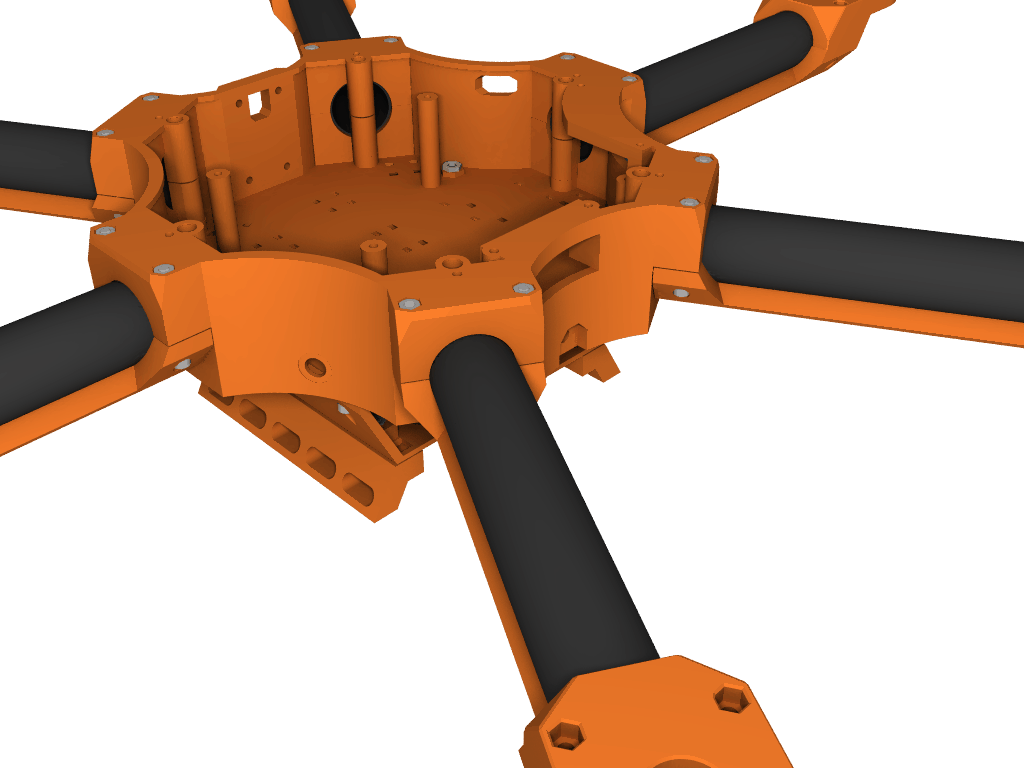
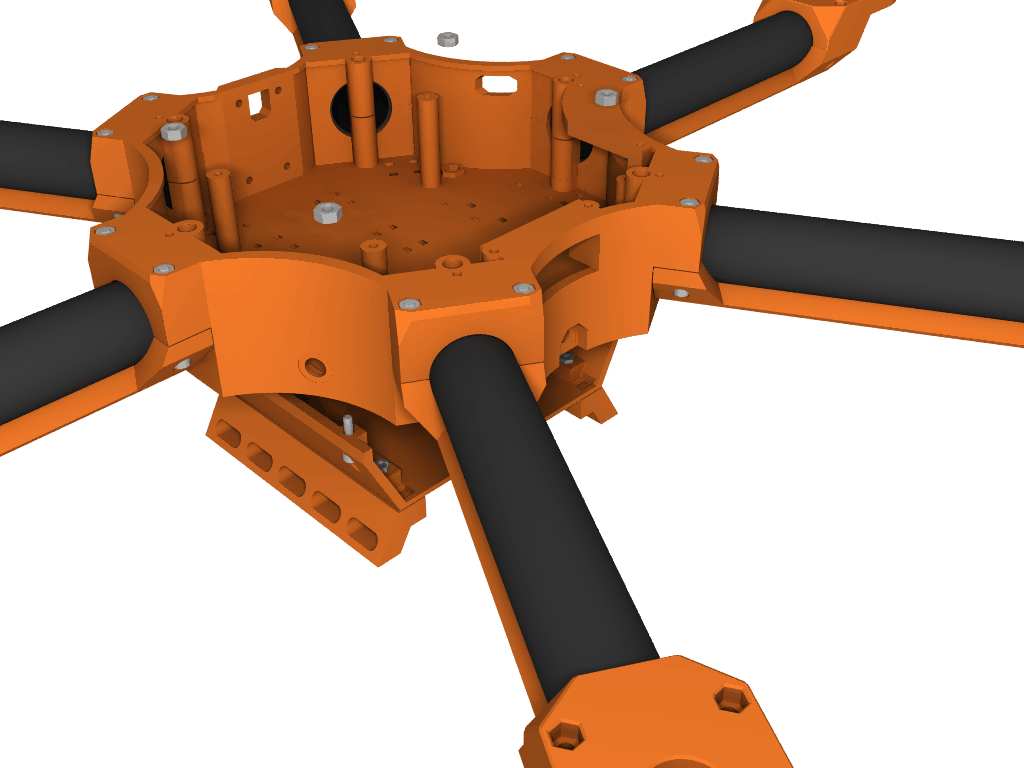
Fasten each wing to the BodyTop part using two M3x30mm Hex Cap Screws and two M3 self locking nuts.
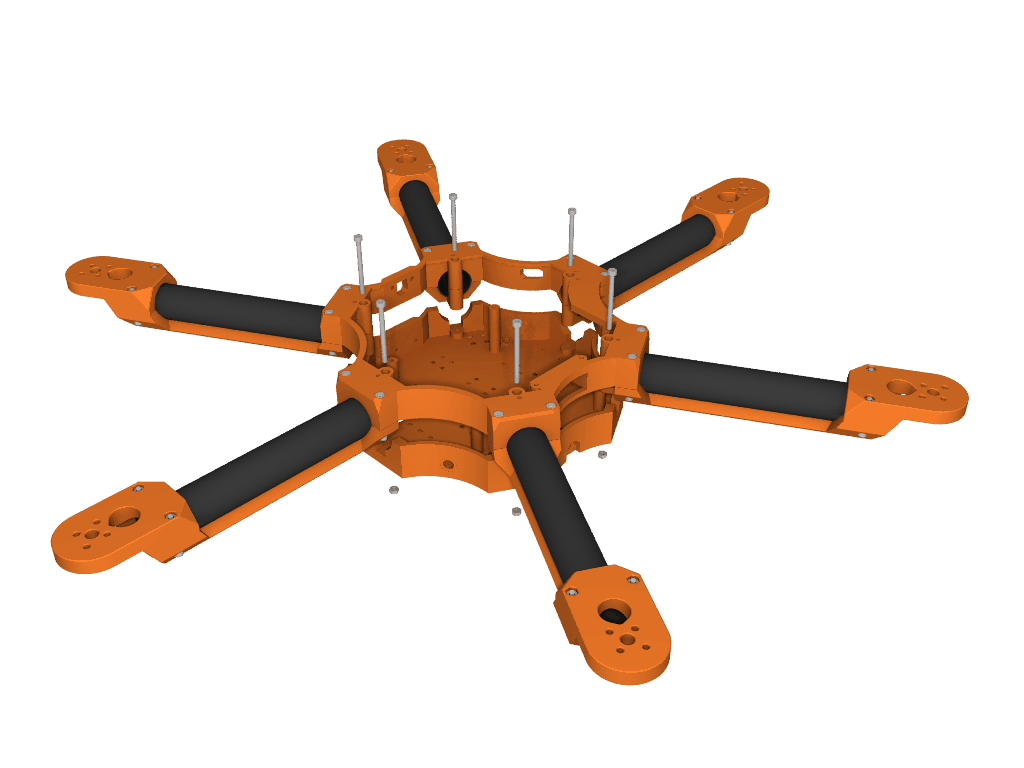
The Collibri Board is mounted on the four columns using 4pcs of M3x10mm hex cap screws. The wings and the BodyTop part are fixed with 4pcs of M3x40mm and 6pcs of M3 self locking nuts.
The four Electronic Speed Controllers are mounted with zip ties under the Collibri Board.
The Power Distribution Board is mounted with 2pcs of M3x5mm hex cap screws, directly screwed on the bottom.
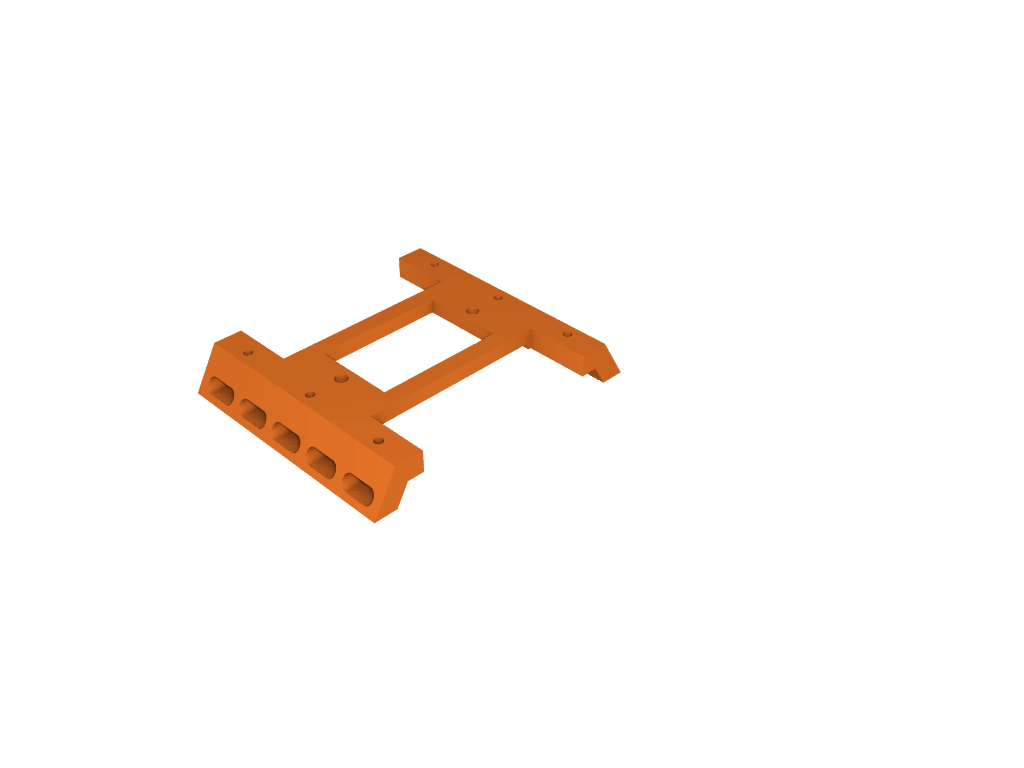
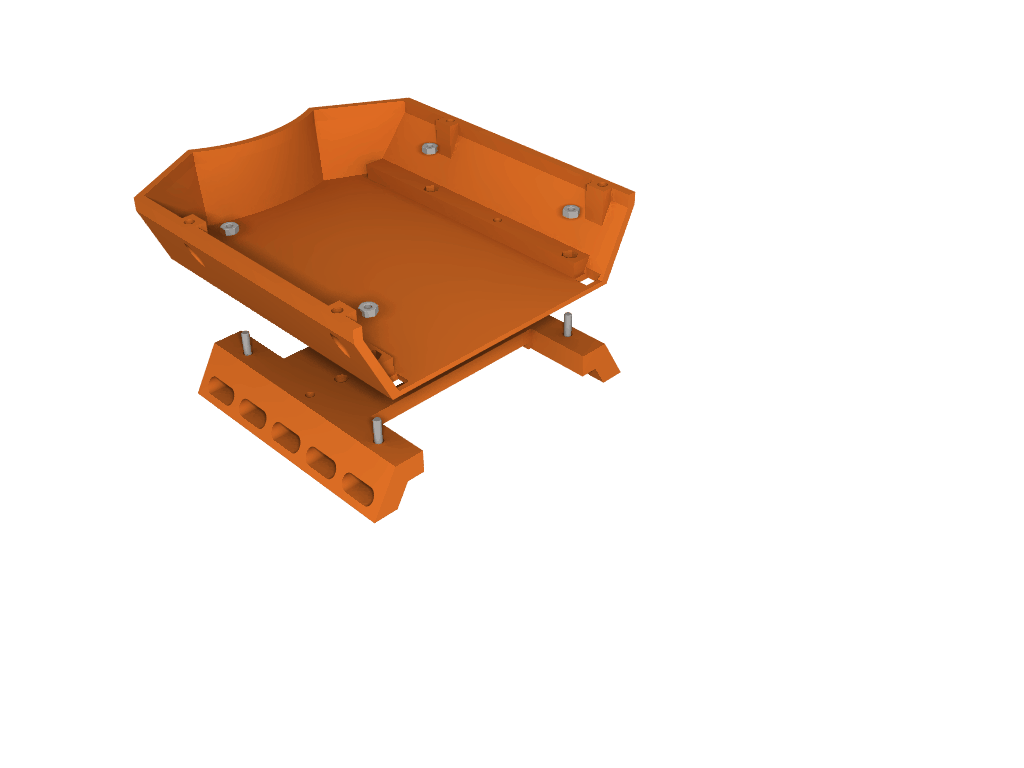
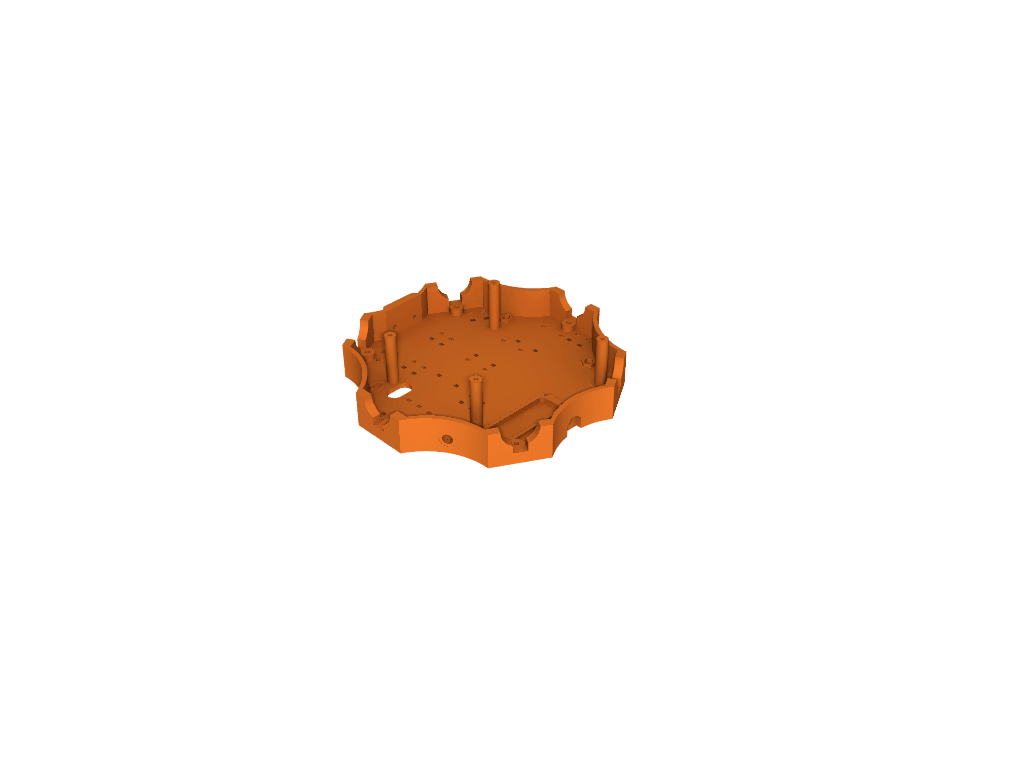
Attach the Landing Gear part to the bottom of the BatteryBox part with 4pcs of M3x15mm Hex Cap Screws and 4pcs of M3 self locking nuts.
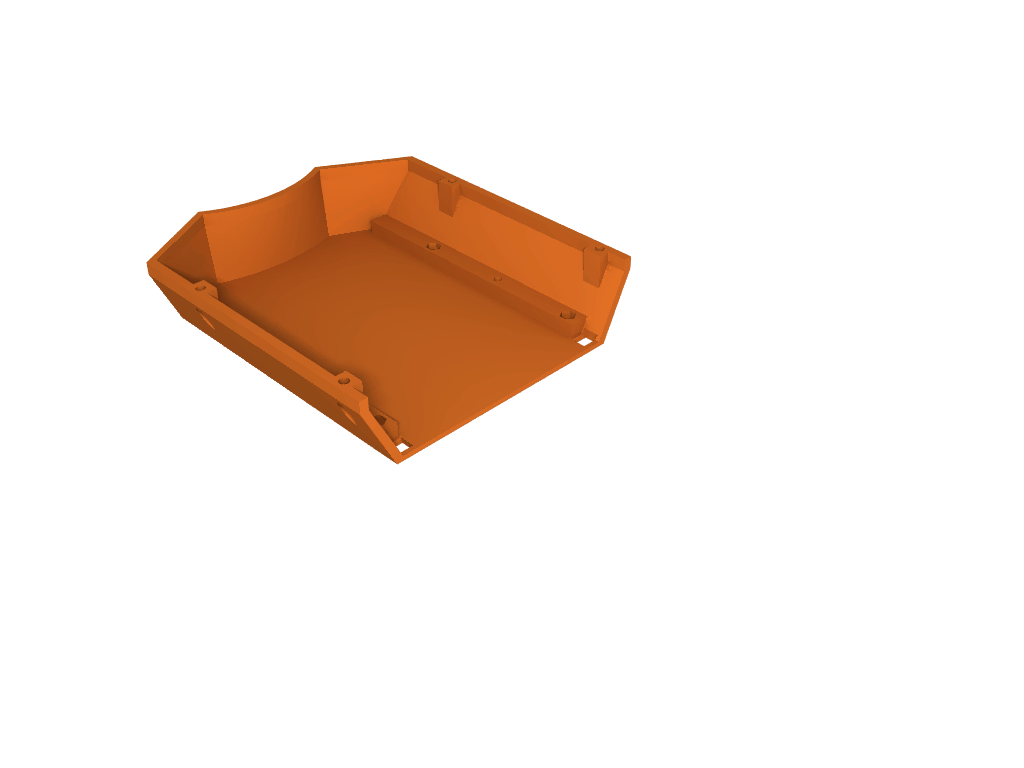
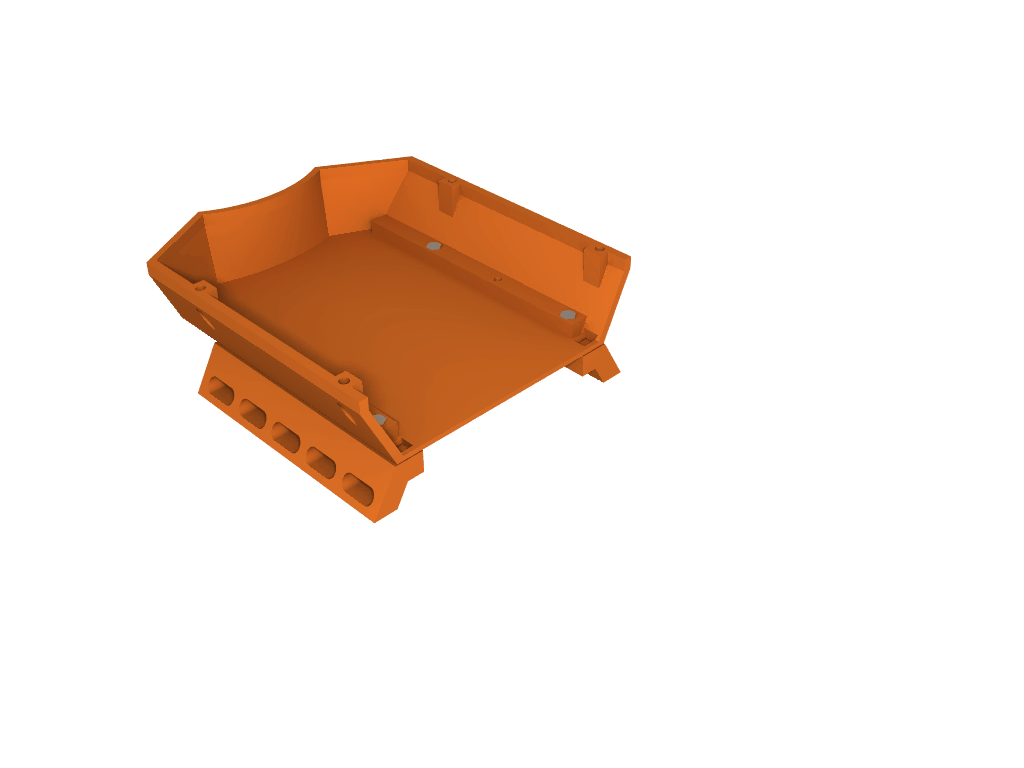
Attach the Battery Box part to the bottom with 4pcs of M3x10mm Hex Cap Screws.

Place the battery cover.

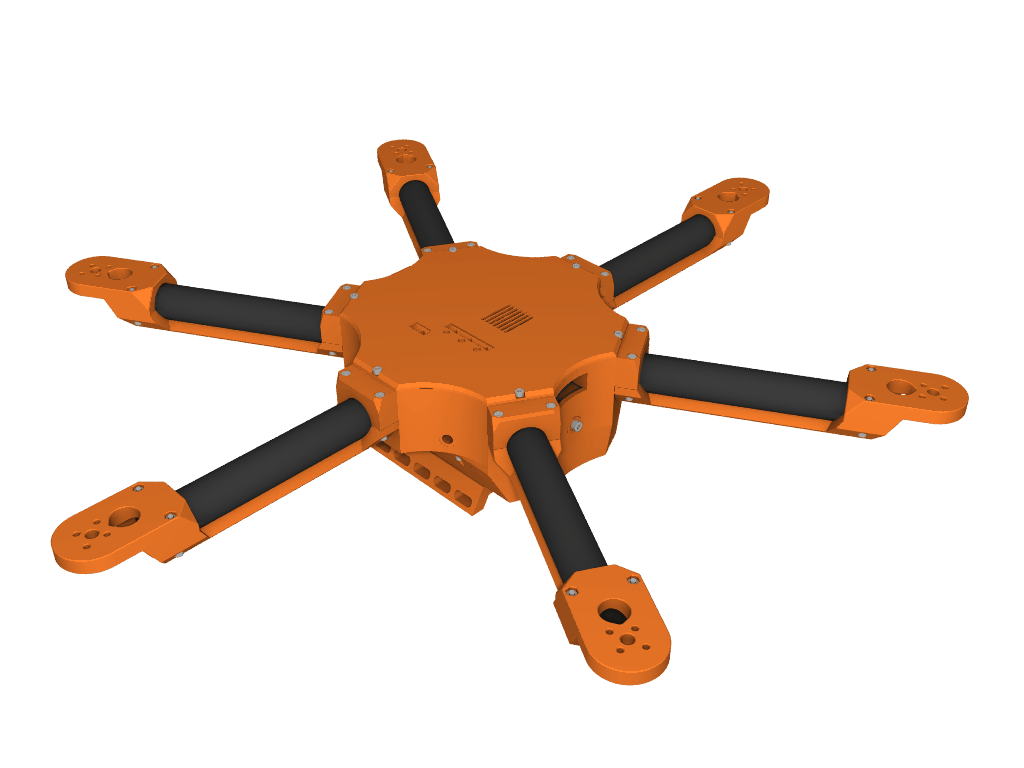
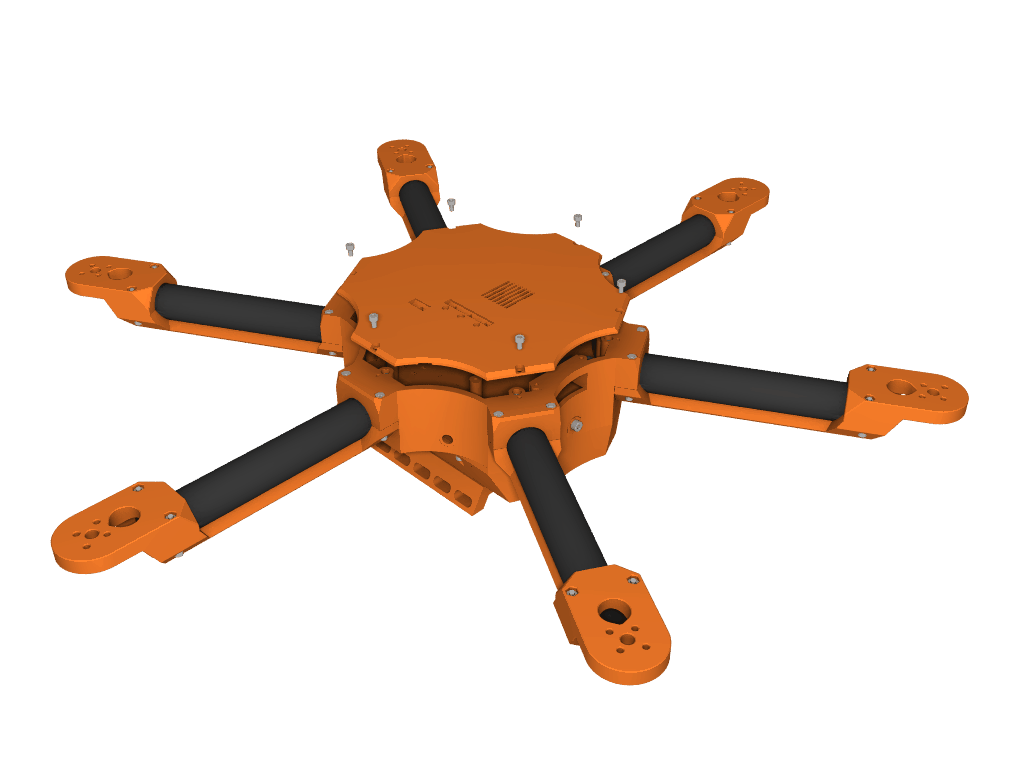
Attach the Body Cover part to the top with 6pcs of M3x5mm Hex Cap Screws.
© 2017 Sigmadrone